
Introducció
Mechanical Turk és un servei web d’Amazon que ofereix accés a una base massiva de treballadors d’arreu del món anomenats turks [‘turcs’], que estan disposats a fer tasques molt simples i repetitives per preus molt baixos: a l’entorn de dos cèntims de dòlar estatunidenc per tasca, a l’entorn d’un dòlar per hora de treball.
El servei es va crear seguint la noció d’artificial artificial intelligence. Aquesta noció, amb la paraula artificial negant-se a si mateixa, proposa que determinades tasques que Amazon o altres empreses encarregarien a algorismes computacionals són, en realitat, resoltes més ràpidament i econòmicament per persones humanes. Per tant, és millor encarregar-les a persones.
La noció d’artificial artificial intelligence es refereix, aleshores, a intel·ligència humana «pretenent ser intel·ligència artificial» o, dit d’una altra manera, a «gent treballant com si fossin algorismes».
El nom del servei fa referència a un autòmat construït al segle xviii per Wolfgang von Kempelen. L’autòmat incorporava un tauler d’escacs i una figura de mig cos que volia representar un turc. Aquest «turc» era capaç de jugar als escacs amb una gran habilitat. No obstant això, era un «fals autòmat»: amagava a dins un mestre dels escacs que controlava en realitat els moviments del turc.
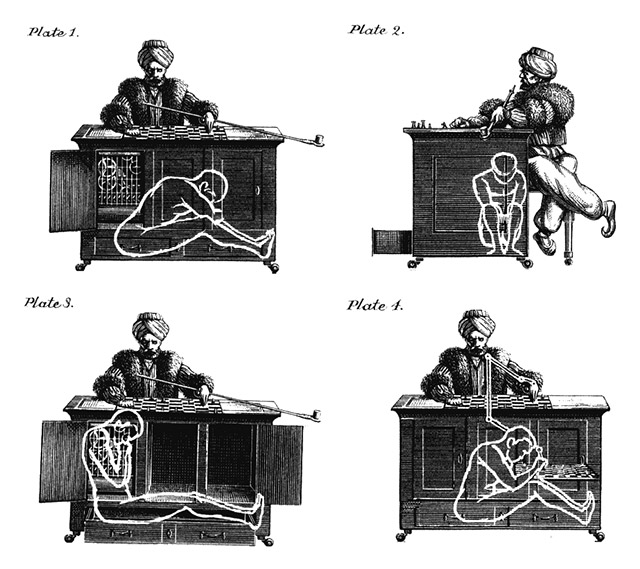
Fotografia d’El turco mecánico, de Wolfgang Von Kempelen
Font: https://i.pinimg.com/originals/7c/c2/b4/7cc2b404c783387b8c2bbca57945846a.gif
El «turc mecànic» de Von Kempelen era, aleshores, una persona fent-se passar per màquina, o que, amagada a dins de la màquina, feia passar la seva intel·ligència per la d’aquella.
Què és?
Els «turcs mecànics» de Kempelen i Amazon plantegen formes de dissolució, fusió i subversió de les jerarquies entre l’humà i el no humà, entre cos i tecnologia, el maquínic i l’orgànic.
Podem emplaçar aquests plantejaments en un corrent de pensament que s’ha anomenat posthumanisme i que busca explorar l’humà més enllà de l’humà, en les seves amplificacions tècniques, en el seu cohabitar desjerarquitzat amb el no humà.
No obstant això, el Mechanical Turk d’Amazon planteja un posthumanisme fosc, en què l’extensió del cos humà, més enllà dels seus confins i la desjerarquització de les relacions entre l’humà i el no humà, no porta a una nova comprensió del món, sinó a noves formes d’explotació.
Veurem treballs de performance que busquen l’amplificació o superació de l’humà mitjançant mitjans tècnics que operen en l’espai liminar d’aquesta distinció entre humà i no humà, que exploren la confluència entre aquestes categories o la seva dissolució, així com treballs en què l’element humà queda subordinat, fora de pla o, fins i tot, completament absent.
Exemples
Eva i Franco Mattes, BEFNOED (2013 – en curs)

Fotografia de BEFNOED, d’Eva i Franco Mattes (2013 – en curs)
Font: https://0100101110101101.org/befnoed/
A BEFNOED (acrònim per a by everyone, for no one, every day), Eva i Franco Mattes utilitzen plataformes com Mechanical Turk per contractar gent que rep instruccions per realitzar performances breus i gravar-les per mitjà de la seva càmera web. Aquests enregistraments són després disseminats per xarxes socials poc conegudes o en desús, en països com Cambodja, Rússia o la Xina.
Les instruccions que es donen a les persones treballadores per realitzar les performances són repetitives, breus i absurdes, com ara llepar una llanta de cotxe, treure el cap per la part superior d’un arbust o aparèixer cobert amb una manta.
Aquest tipus de gestos entre l’humorístic i el deshumanitzador semblen funcionar com una crítica en dues direccions: d’una banda, a les mateixes plataformes com Mechanical Turk i a la mena de tasques repetitives i desconnectades de qualsevol propòsit reconeixible que reben els seus treballadors, i, de l’altra, a determinats treballs en art basats en instruccions, com les One minute sculptures, d’Erwin Wurm.
Aquesta segona crítica, intraartística, se subratlla a l’exposició en sala de BEFNOED, en què els artistes mostren els vídeos de les performances en monitors col·locats de tal manera que obliguen l’audiència a adoptar posicions forçades per poder-los veure.
BEFNOED es pot entendre com un dispositiu compost per una sèrie d’elements humans i no humans que operen en un nivell semblant, de manera desjerarquitzada o en què l’element humà no ocupa necessàriament un lloc superior a la jerarquia: plataformes com Amazon Turk, persones seguint instruccions massivament, registres de les performances circulant per fosques xarxes socials, l’audiència adoptant posicions forçades, etc.
Si bé a BEFNOED hi trobem diversos elements característics de la performance, com ara el cos, l’acció, el registre audiovisual, etc., no hi ha, però, cap rastre de subjectivitat humana o d’expressió artística en ús, sinó una sèrie d’accions repetitives, forçoses i despullades de sentit per si mateixes empeltades en un sistema digital en xarxa de producció i disseminació massiva.
Finalment, en aquest treball hi podem llegir cert èmfasi en l’automatització de l’humà, o la inserció de l’humà en formes d’automatització distribuïda.
Marcel·lí Antúnez Roca, Epizoo (1994) i Requiem (1999)
Fotografia d’Epizoo, de Marcel·lí Antúnez Roca (1994)
Font: http://www.marceliantunez.com/work/epizoo/

Fotografia de Requiem, de Marcel·lí Antúnez Roca (1999)
Font: http://www.marceliantunez.com/work/requiem/
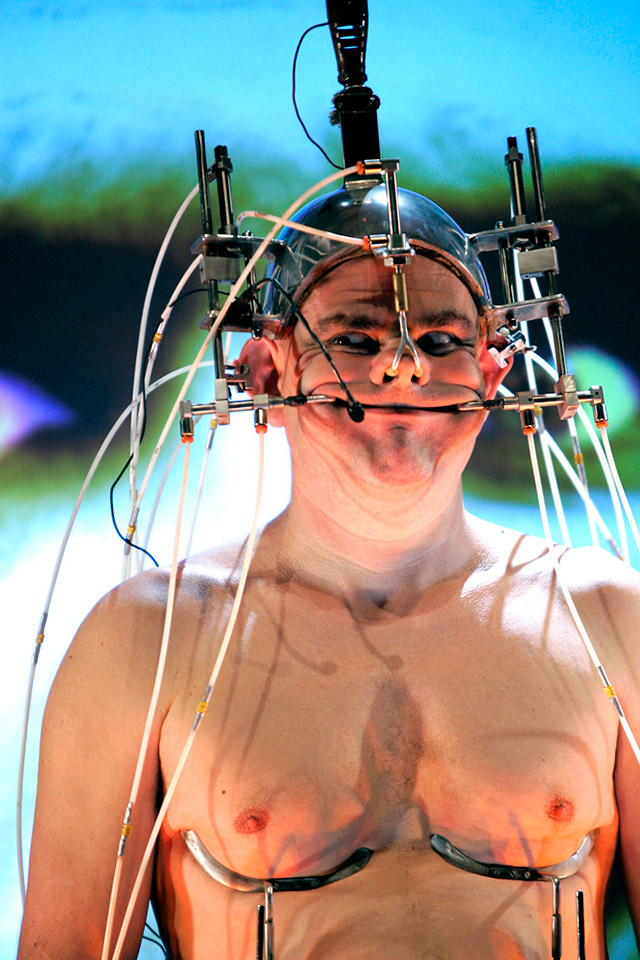
A Epizoo, Antúnez porta un exoesquelet robòtic capaç d’activar i moure diverses parts del seu cos (pits, natges, boca, etc.) de manera involuntària per a ell.
Aquest exoesquelet està controlat per una interfície en mans de l’audiència visitant, disponible en un ordinador a la sala. La interfície, entre animació i videojoc interactiu, permet activar diferents elements de l’exoesquelet, controlant efectivament el moviment del cos d’Antúnez.
Simultàniament, a la interfície i en una pantalla darrere d’Antúnez, es mostren diverses representacions caricaturitzades del seu cos, com homuncles, les extremitats i les faccions dels quals es deformen i donen lloc a altres cossos possibles.
Requiem és, potser, una extensió d’Epizoo, en què l’exoesquelet creix en grandària i capacitats, i pot executar múltiples torsions sobre el cos que conté (ja no únicament el d’Antúnez): als genolls, les cuixes, els engonals, els malucs, les espatlles, els colzes, la mandíbula i les mans.
De nou, és l’audiència qui controla aquests moviments involuntaris, aquesta vegada mitjançant diversos sensors a la sala que disparen seqüències de gestos que augmenten en freqüència a mesura que s’acosten al cos mecanitzat.
En paraules d’Antúnez, Requiem (i en bona part Epizoo) estén la idea de les pròtesis fins a les últimes conseqüències, les d’un cos totalment sotmès i superat pel conjunt d’elements robòtics que l’envolten, així com pel sistema distribuït de control a què se sotmet.
Com un contradiscurs d’aquesta noció de sotmetiment de l’humà a elements maquínics i sistèmics, tant a Epizoo com a Requiem el cos conserva certa llibertat. Això permet a Antúnez i altres performers introduir gestos o moviments, així com amplificar o resistir els que l’exoesquelet força sobre ells.
Aquesta relació entre cos humà i robot pren a vegades la forma d’una dansa, en què es difumina l’origen dels moviments i la gestualitat de, per exemple, el cap i la cara de la performer domina el sentit del moviment general de la figura híbrida.
Finalment, a Requiem (com al seu títol) hi ha un discurs sobre la mort. La coreografia del cos no requereix, potencialment, que aquest continuï amb vida. Antúnez anomena l’exoesquelet sarcòfag mecànic, i parla de com aquest permetria esquivar la immobilitat que la mort imposa sobre el cos.
En aquest sentit, i enfront de l’estètica de perversió industrial i sarcasme carnavalesc que Antúnez imprimeix al seu treball, Requiem proposa una relació assertiva amb la tecnologia, en la mesura que ens permet anar més enllà de les nostres limitacions biològiques, incloent-hi la frontera última de la mort del cos.
Orlan, Orlan-oïde (2018)

Fotografia d’Orlan-oïde, d’Orlan (2018)
Font: http://www.orlan.eu/orlan-et-lorlanoide/
Per a una exposició sobre artistes i robots realitzada pel Grand Palais, el 2018, Orlan desenvolupa un robot a imatge i semblança seva. Aquest robot, presentat sota la noció de strip-tease, utilitzada en diversos dels seus treballs, exposa els seus mecanismes de coll cap avall, i porta una màscara i una perruca realistes que reprodueixen el cap de la mateixa Orlan de coll cap amunt.
El robot, anomenat Orlan-oïde, observa l’audiència, es mou, dansa i parla amb una veu sintètica desenvolupada a partir de la veu de la mateixa Orlan. El robot, al seu torn, desplega un discurs construït col·lectivament mitjançant una aplicació al seu lloc web, entorn dels temes propis del treball d’Orlan.
Algunes de les seves obres més cèlebres consisteixen en performances de cirurgia estètica real. Aquestes performances incorporen vestuari, escenografia, textos i altres elements. Aquests treballs plantegen, d’una banda, un ús assertiu i subversiu dels cànons de bellesa femenina, tal com s’expressen en la història de l’art i fora d’ella, i, de l’altra, una superació, en clau posthumanista, de les limitacions biològiques del propi cos.
Orlan-oïde s’ha d’entendre aleshores com una resposta d’Orlan, des de la seva extensa línia de treball i pensament, a l’emergència o especialització de noves tecnologies, com ara la intel·ligència artificial, la robòtica i les plataformes digitals en xarxa.
Una de les qüestions que apareixen en el treball d’Orlan, i en particular a la performance Orlan-oïde, és la qüestió de la mort. Per Orlan, de nou en clau posthumanista assertiva, la mort ha de ser superada. Tal com fèiem amb Requiem d’Antúnez, podem llegir Orlan-oïde com un assaig de formes tecnificades de superació de la mort, com a límit definidor de la biologia humana, des de la performance.
Stelarc, Ear on Arm (1997 – en curs)
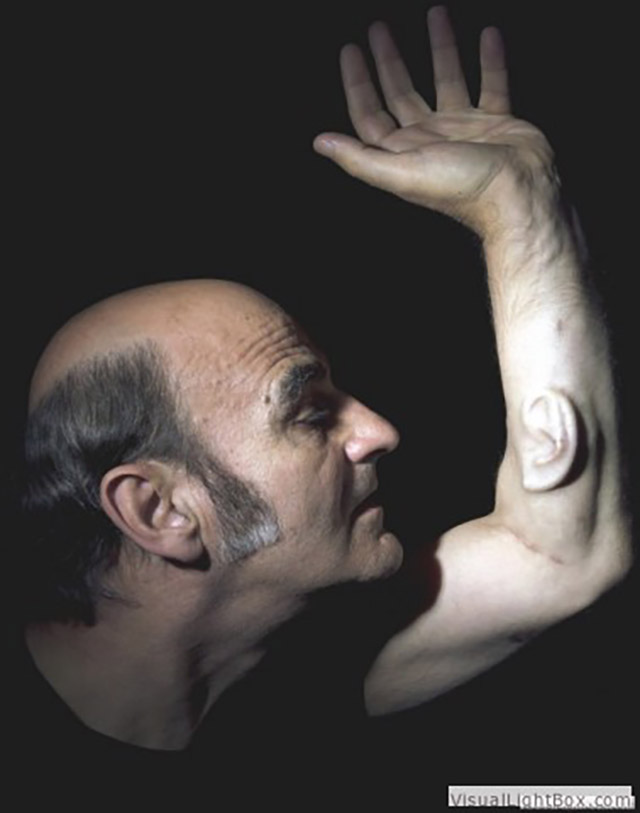
Fotografia d’Ear on Arm, de Stelarc (1997 – en curs)
Font: http://stelarc.org/?catID=20242
Com Orlan, Stelarc és un artista pioner en el seu àmbit, en aquest cas el de la pròtesi i la robòtica. Des dels noranta ha desenvolupat múltiples projectes que treballen amb l’extensió i modificació del cos humà. Ha realitzat performances amb una tercera mà, un braç estès, una mà virtual o una escultura estomacal.
Com Antúnez, Stelarc explora la coreografia involuntària del cos mitjançant la xarxa, exoesquelets robòtics i estimulació muscular elèctrica.
Ear on Arm és un projecte de molt llarg recorregut en què l’artista persegueix i aconsegueix finalment produir una tercera orella a partir de tècniques de reconstrucció de teixits, per a a continuació empeltar-la a la part interior del braç.
El procés ha requerit la col·laboració amb entitats especialitzades en biotecnologia, així com l’ús d’equipaments i tècniques avançats per a l’àmbit.
Després de produir-la usant un cartílag cultivat a partir de teixits del mateix Stelarc, així com cèl·lules mare d’origen divers, l’orella va ser introduïda al braç de Stelarc mitjançant diverses intervencions quirúrgiques i va superar dificultats tècniques com ara necrosis i altres problemes.
Com a últim pas del projecte, Stelarc ha estat mirant de dotar aquesta orella d’un micròfon amb connectivitat sense fil que permeti transmetre via xarxes allò que sent la seva tercera orella, perquè persones en altres llocs també puguin sentir a través d’ella.
El projecte reprodueix una estructura corporal, la ressitua i busca recablejar-la per afegir-li funcions alternatives. Es tracta tant d’una modificació de l’arquitectura evolutiva humana com d’un intent per integrar elements artificials, com l’electrònica, al cos. En paraules de Stelarc, avui podem dissenyar òrgans addicionals i externs per funcionar millor en el terreny tecnològic i mediàtic que habitem.
Ear on Arm és un treball netament posthumanista, en el seu vessant d’expansió assertiva del cos humà, amb determinats aspectes que suggereixen la desjerarquització entre elements considerats part de l’humà i el no humà, l’artificial o el tècnic. En el projecte encara hi trobem, no obstant això, l’ésser humà, el seu cos i subjectivitat al centre, amb la tecnologia com una eina per amplificar-lo i modificar-lo, i no com una entitat a la qual se li apreciï una existència pròpia simultània a la humana, com sí que passa en determinades expressions del posthumanisme i de corrents filosòfics afins, com els anomenats nous materialismes.
Simon Fujiwara, Likeness (2018)

Fotografia de Likeness, de Simon Fujiwara (2018)
Font: https://vimeo.com/384600017
Likeness és un treball que es construeix entorn de dos elements en certa manera humanitzats: una rèplica en cera de la figura d’Anna Frank i un robot mòbil que incorpora un braç mecànic i una càmera amb què explora i construeix la imatge videogràfica de la figura d’Anna Frank.
Durant l’exposició, l’audiència observa la figura de cera, present físicament, d’una banda, i la construcció videogràfica de la seva imatge, per part del robot, de l’altra.
El treball està en la línia temàtica d’altres treballs en aquest i altres apartats de l’Art Toolkit de performance, com el d’Amalia Ulman, en la mesura que explora la construcció pública de la imatge d’Anna Frank mitjançant un dispositiu tècnic.
Ho fa, en primer lloc, per mitjà de la construcció detallada del seu cos de cera: el to de pell, cabells, ulls, peus, cames, braços, mans, gest, mirada, roba, etc.; així com de l’entorn immediat en què se situa: escriptori, fotografia, dibuixos, ploma, text, etc.
I ho fa, en segon lloc, mitjançant la metamorfosi que els moviments robòtics de la càmera produeixen sobre la seva figura: contrapicant el pla de la cara i mostrant-nos-en les mans en l’acte d’escriptura, la foto d’ella mateixa a l’escriptori, recorrent la figura des dels peus a un pla general elevat de l’escena, etc.
En el context d’aquest apartat, el més ressenyable de l’obra, com a performance, és l’absència de l’element humà i, més específicament, com l’absència de l’element humà no impedeix llegir l’obra com a performance. A Likeness hi trobem cos, acció, presència, audiència i formes de registre videogràfic, elements tots ells definidors de la performance. A «Likeness», però, no hi ha una presència humana de carn i os.
A més de la particular presència del cos de cera d’Anna Frank, són els moviments del braç robòtic els que transformen la nostra mirada i percepció subjectiva, els que donen a «Likeness» el seu caràcter «viu» o «en viu».
Louis-Philippe Demers, The blind robot

Fotografia de The blind robot, de Louis-Philippe Demers
Font: https://www.flickr.com/photos/arselectronica/9499991149/in/photostream/
El «robot cec» de Louis-Philippe Demers consisteix en un parell de braços d’estètica mecànica connectats a un tors mínim i sense cap. Una sola persona s’asseu davant del robot. Darrere del robot, un mirall li retorna el reflex de la seva cara.
El robot alça els braços i comença a moure rítmicament els dits, recorrent amb cura el cap, la cara, les espatlles i els braços d’aquesta persona. El robot toca amb prudència, com si intentés de veure-hi. La persona, al seu torn, veu al mirall la seva pròpia figura explorada pels dits curosos del «robot cec».
Per a Louis-Philippe Demers, el tacte del robot, associat a la idea de la seva ceguesa, contribueix a percebre’l com una entitat vulnerable. I això, al seu torn, facilita que el robot, amb el seu tocar, desencadeni una experiència d’una certa intimitat en l’audiència.
El robot no compleix amb les expectatives de fredor emfatitzades per la seva aparença mecànica. Per contra, la cura, la vulnerabilitat i la intimitat se situen al robot i en provenen. Aquest desplaçament dels atributs i capacitats afectives és el que dona tensió a la performance.
El caràcter afectiu de la performance no rau ni tan sols en la semblança amb l’humà. És mitjançant el seu propi moviment maquínic que el robot corporeiïtza formes d’intimitat.
A diferència d’altres treballs vistos més amunt, The blind robot planteja una relació amb el no humà i amb el robòtic basada en formes de cura i curiositat afectuosa.
Referències
Dixon, S. (2007). Digital performance. A history of new media in theater, dance, performance art, and installation. MIT Press.
Eckersall, P.; Grehan, H.; Scheer, E. (2017). New Media Dramaturgy. Palgrave Macmillan UK. <https://doi.org/10.1057/978-1-137-55604-2>