
Introducción
Mechanical Turk es un servicio web de Amazon que ofrece acceso a una base masiva de trabajadores de todo el mundo llamados turks (‘turcos’), que están dispuestos a realizar tareas muy simples y repetitivas por muy bajos precios: alrededor de dos céntimos de dólar estadounidense por tarea, alrededor de un dólar por hora de trabajo.
El servicio se creó siguiendo la noción de artificial artificial intelligence. Esta noción, con la palabra artificial negándose a sí misma, propone que determinadas tareas del tipo que Amazon u otras empresas encargarían a algoritmos computacionales son, en realidad, mucho más rápidas y económicamente resueltas por personas humanas. Por tanto, es mejor encargárselas a personas.
La noción de artificial artificial intelligence se refiere, entonces, a inteligencia humana «pretendiendo ser inteligencia artificial» o, dicho de otro modo, a «gente trabajando como si fueran algoritmos».
El nombre del servicio hace referencia a un autómata construido en el siglo XVIII por Wolfgang Von Kempelen. El autómata incorporaba un tablero de ajedrez y una figura de medio cuerpo que quería representar un turco. Este «turco» era capaz de jugar al ajedrez con gran soltura. Sin embargo, era un «falso autómata»: ocultaba en su interior a un maestro del ajedrez que controlaba en realidad los movimientos del turco.
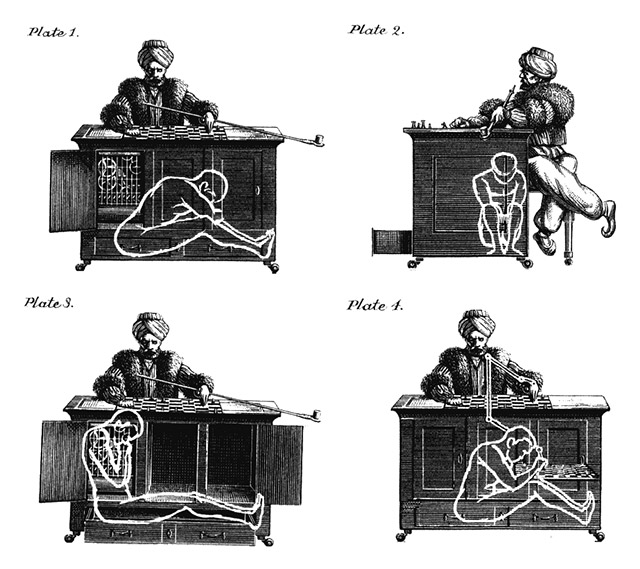
Fotografía de El turco mecánico, de Wolfgang Von Kempelen
Fuente: https://i.pinimg.com/originals/7c/c2/b4/7cc2b404c783387b8c2bbca57945846a.gif
El «turco mecánico» de Von Kempelen era, entonces, una persona haciéndose pasar por máquina, o que, oculta en el interior de la máquina, hacía pasar su inteligencia por la de aquella.
¿Qué es?
Los «turcos mecánicos» de Kempelen y Amazon plantean formas de disolución, fusión y subversión de las jerarquías entre lo humano y lo no humano, entre cuerpo y tecnología, lo maquínico y lo orgánico.
Podemos emplazar estos planteamientos en una corriente de pensamiento que se ha llamado poshumanismo y que busca explorar lo humano más allá de lo humano, en sus amplificaciones técnicas, en su cohabitar desjerarquizado con lo no humano.
Sin embargo, el Mechanical Turk de Amazon plantea un poshumanismo oscuro, donde la extensión del cuerpo humano, más allá de sus confines y la desjerarquización de las relaciones entre lo humano y lo no humano, no lleva a una nueva comprensión del mundo, sino a nuevas formas de explotación.
Veremos trabajos de performance que buscan la amplificación o superación de lo humano mediante medios técnicos que operan en el espacio liminal de esa distinción entre humano y no humano, que exploran confluencia entre estas categorías o su disolución, así como trabajos donde el elemento humano queda subordinado, fuera de plano o, incluso, completamente ausente.
Ejemplos
Eva y Franco Mattes, BEFNOED (2013 – en curso)

Fotografía de BEFNOED, de Eva y Franco Mattes (2013 – en curso)
Fuente: https://0100101110101101.org/befnoed/
En BEFNOED (acrónimo para by everyone, for no one, every day), Eva y Franco Mattes utilizan plataformas como Mechanical Turk para contratar gente que recibe instrucciones para realizar performances breves y grabarlas por medio de su cámara web. Estas grabaciones son después diseminadas por redes sociales poco conocidas o en desuso, en países como Camboya, Rusia o China.
Las instrucciones dadas a las personas trabajadoras para realizar las performances son repetitivas, breves y absurdas, como lamer una llanta de coche, asomar la cabeza por la parte superior de un arbusto o aparecer cubierto con una manta.
Este tipo de gestos entre lo humorístico y lo deshumanizante parecen funcionar como una crítica en dos direcciones: por un lado, a las propias plataformas como Mechanical Turk y al tipo de tareas repetitivas y desconectadas de cualquier propósito reconocible que reciben sus trabajadores. Y, por otro lado, a determinados trabajos en arte basados en instrucciones, como las One minute sculptures, de Erwin Wurm.
Esta segunda crítica, intraartística, se subraya en la exhibición en sala de BEFNOED, donde las artistas muestran los vídeos de las performances en monitores colocados de tal manera que obligan a la audiencia a adoptar posiciones forzadas para poder ver.
BEFNOED puede entenderse como un dispositivo compuesto por una serie de elementos humanos y no humanos que operan a similar nivel, de forma desjerarquizada o donde el elemento humano no ocupa necesariamente un lugar superior en la jerarquía: plataformas como Amazon Turk, personas siguiendo instrucciones masivamente, registros de las performances circulando por oscuras redes sociales, la audiencia adoptando posiciones forzadas, etc.
Si bien en BEFNOED encontramos diversos elementos característicos de la performance, como cuerpo, acción, registro audiovisual, etc., no hay, sin embargo, rastro de subjetividad humana o de expresión artística al uso, sino una serie de acciones repetitivas, forzosas y despojadas de sentido por sí mismas injertadas en un sistema digital en red de producción y diseminación masiva.
Finalmente, en este trabajo podemos leer cierto énfasis en la automatización de lo humano, o la inserción de lo humano en formas de automatización distribuida.
Marcel·lí Antúnez Roca, Epizoo (1994) y Requiem (1999)
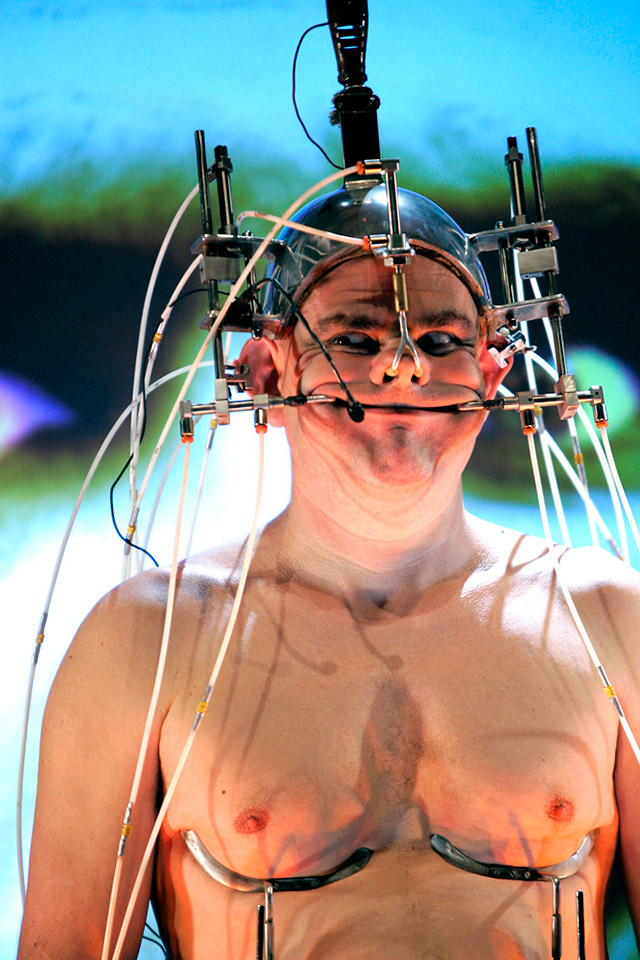
Fotografía de Epizoo, de Marcel·lí Antúnez Roca (1994)
Fuente: http://www.marceliantunez.com/work/epizoo/

Fotografía de Requiem, de Marcel·lí Antúnez Roca (1999)
Fuente: http://www.marceliantunez.com/work/requiem/
En Epizoo, Antúnez viste un exoesqueleto robótico capaz de activar, mover, diversas partes de su cuerpo: pechos, nalgas, boca, etc., de forma involuntaria para él.
Este exoesqueleto está controlado por una interfaz en manos de la audiencia visitante, disponible en un ordenador en sala. La interfaz, entre animación y videojuego interactivo, permite activar distintos elementos del exoesqueleto, efectivamente controlando el movimiento del cuerpo de Antúnez.
Simultáneamente, en la interfaz, y en una pantalla tras Antúnez, se muestran diversas representaciones caricaturizadas de su cuerpo, como homúnculos, cuyas extremidades y facciones se deforman y dan lugar a otros cuerpos posibles.
Requiem es, quizá, una extensión de Epizoo, donde el exoesqueleto crece en tamaño y capacidades, y que puede ejecutar múltiples torsiones sobre el cuerpo que contiene (ya no únicamente el de Antúnez): en sus rodillas, los muslos, las ingles, las caderas, los hombros, los codos, la mandíbula y las manos.
De nuevo, es la audiencia quien controla estos movimientos involuntarios, esta vez mediante diversos sensores en sala que disparan secuencias de gestos que aumentan en frecuencia conforme se acercan al cuerpo mecanizado.
En palabras de Antúnez, Requiem (y en gran medida Epizoo) extiende la idea de las prótesis hasta sus últimas consecuencias, la de un cuerpo totalmente sometido y superado por el conjunto de elementos robóticos que lo envuelven, así como por el sistema distribuido de control al que se somete.
Como un contradiscurso a esta noción de sometimiento de lo humano a elementos maquínicos y sistémicos, tanto en Epizoo como en Requiem el cuerpo conserva cierta libertad. Esto permite a Antúnez y otras performers introducir gestos o movimientos, así como amplificar o resistirse a los que el exoesqueleto fuerza sobre ellas.
Esta relación entre cuerpo humano y robot toma en ocasiones la forma de una danza, donde se difumina el origen de los movimientos y donde la gestualidad de, por ejemplo, cabeza y cara de la performer domina el sentido del movimiento general de la figura híbrida.
Finalmente, en Requiem (como en su título) hay un discurso sobre la muerte. La coreografía del cuerpo no requiere, potencialmente, que este siga con vida. Antúnez llama al exoesqueleto sarcófago mecánico, y habla de cómo este permitiría burlar la inmovilidad que la muerte impone sobre el cuerpo.
En este sentido, y frente a la estética de perversión industrial y sarcasmo carnavalesco que Antúnez imprime a su trabajo, Requiem propone una relación asertiva con la tecnología, en tanto que nos permite ir más allá de nuestras limitaciones biológicas, incluyendo la frontera última de la muerte del cuerpo.
Orlan, Orlan-oïde (2018)

Fotografía de Orlan-oïde, de Orlan (2018)
Fuente: http://www.orlan.eu/orlan-et-lorlanoide/
Para una exposición sobre artistas y robots realizada por Grand Palais, en 2018, Orlan desarrolla un robot a su imagen y semejanza. Este robot, presentado bajo la noción de strip-tease, utilizada en diversos de sus trabajos, expone sus mecanismos de cuello para abajo, vistiendo una máscara y peluca realistas que reproducen la cabeza de la misma Orlan de cuello para arriba.
El robot, llamado Orlan-oïde observa a la audiencia, se mueve, danza y habla con una voz sintética desarrollada a partir de la voz de la propia Orlan. El robot a su vez despliega un discurso construido colectivamente mediante una aplicación en su sitio web, en torno a los temas propios del trabajo de Orlan.
Algunas de sus obras más célebres consisten en performances de cirugía estética real. Estas performances incorporan vestuario, escenografía, textos y otros elementos. Estos trabajos plantean, por un lado, un uso asertivo y subversivo de los cánones de belleza femenina tal y como se expresan en la historia del arte y fuera de ella; y, por el otro, una superación, en clave poshumanista, de las limitaciones biológicas del propio cuerpo.
Orlan-oïde ha de entenderse entonces como una respuesta de Orlan, desde su extensa línea de trabajo y pensamiento, ante la emergencia o especialización de nuevas tecnologías, como la inteligencia artificial, la robótica o las plataformas digitales en red.
Una de las cuestiones que aparecen en el trabajo de Orlan y en particular en la performance Orlan-oïde es la cuestión de la muerte. Para Orlan, de nuevo en clave poshumanista asertiva, la muerte ha de ser superada. Tal y como hacíamos con Requiem de Antúnez, podemos leer Orlan-oïde como un ensayo de formas tecnificadas de superación de la muerte, como límite definitorio de la biología humana, desde la performance.
Stelarc Ear on Arm (1997 – en curso)
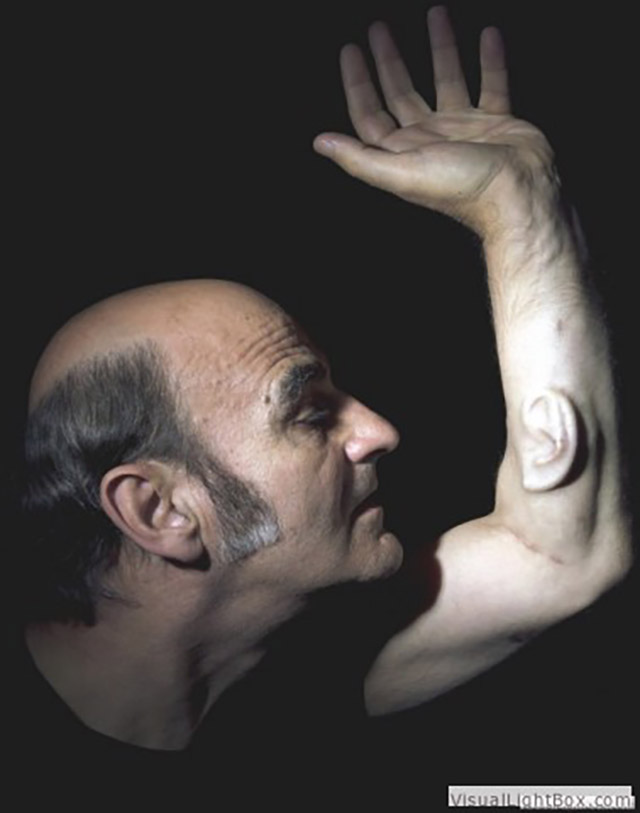
Fotografía de Ear on Arm, de Stelarc (1997 – en curso)
Fuente: http://stelarc.org/?catID=20242
Como Orlan, Stelarc es un artista pionero en su ámbito, en este caso el de la prótesis y la robótica. Desde los noventa ha desarrollado múltiples proyectos que trabajan con la extensión y modificación del cuerpo humano. Ha realizado performances con una tercera mano, un brazo extendido, una mano virtual o una escultura estomacal.
Como Antúnez, Stelarc explora la coreografía involuntaria del cuerpo mediante la red, mediante exoesqueletos robóticos y estimulación muscular eléctrica.
Ear on Arm es un proyecto de muy largo recorrido en el que el artista persigue y logra finalmente producir una tercera oreja a partir de técnicas de reconstrucción de tejidos, para a continuación injertarla en la parte interior del brazo.
El proceso ha requerido la colaboración con entidades especializadas en biotecnología, así como el uso de equipamientos y técnicas avanzadas para el ámbito.
Tras su producción usando un cartílago cultivado a partir de tejidos del propio Stelarc, así como células madre de diverso origen, la oreja fue introducida en el brazo de Stelarc mediante diversas intervenciones quirúrgicas y superó dificultades técnicas como necrosis y otros problemas.
Como último paso del proyecto, Stelarc ha estado tratando de dotar a esa oreja de un micrófono con conectividad inalámbrica que permita transmitir vía redes aquello que su tercera oreja oye, para que personas en otros lugares puedan también escuchar a través de ella.
El proyecto replica una estructura corporal, la reubica y busca recablearla para agregarle funciones alternativas. Se trata tanto de una modificación de la arquitectura evolutiva humana como de un intento por integrar elementos artificiales, como electrónica, en el cuerpo. En palabras de Stelarc, hoy podemos diseñar órganos adicionales y externos para funcionar mejor en el terreno tecnológico y mediático que habitamos.
Ear on Arm es un trabajo netamente poshumanista, en su vertiente de expansión asertiva del cuerpo humano, con determinados aspectos que sugieren la desjerarquización entre elementos considerados parte de lo humano y lo no humano, lo artificial o técnico. En el proyecto todavía encontramos, sin embargo, al ser humano, su cuerpo y subjetividad en el centro, con la tecnología como una herramienta para amplificarlo y modificarlo, y no como una entidad a la que se le aprecie una existencia propia a la par de la humana, como sí sucede en determinadas expresiones del poshumanismo y de corrientes filosóficas afines, como los llamados nuevos materialismos.
Simon Fujiwara, Likeness (2018)

Fotografía de Likeness, de Simon Fujiwara (2018)
Fuente: https://vimeo.com/384600017
Likeness es un trabajo que se construye en torno a dos elementos en cierto modo humanizados: una réplica en cera de la figura de Anna Frank y un robot móvil que incorpora un brazo mecánico y una cámara con la que explora y construye la imagen videográfica de la figura de Anna Frank.
En su exhibición la audiencia observa la figura de cera, de cuerpo presente, por un lado; y la construcción videográfica de su imagen, por parte del robot, por el otro.
El trabajo se encuentra en la línea temática de otros de los trabajos en este y otros apartados del ArtToolkit de performance, como el de Amalia Ulman, en tanto explora la construcción pública de la imagen de Anna Frank mediante un dispositivo técnico.
Lo hace, en primer lugar, mediante la construcción pormenorizada de su cuerpo de cera: su tono de piel, cabello, ojos, pies, piernas, brazos, manos, gesto, mirada, ropa, etc.; así como del entorno inmediato en el que se emplaza: escritorio, fotografía, dibujos, pluma, texto, etc.
Y lo hace, en segundo lugar, mediante la metamorfosis que los movimientos robóticos de la cámara producen sobre su figura: contrapicando el plano de su cara, mostrándonos sus manos en el acto de escritura, la foto de sí misma en el escritorio, recorriendo la figura desde sus pies a un plano general elevado de la escena, etc.
En el contexto de este apartado lo más reseñable de la obra, como performance, es la ausencia del elemento humano y, más específicamente, cómo la ausencia del elemento humano no impide leer la obra como performance. En Likeness encontramos cuerpo, acción, presencia, audiencia y formas de registro videográfico, elementos todos ellos definitorios de la performance. En «Likeness», sin embargo, no hay una presencia humana de carne y hueso.
Además de la particular presencia del cuerpo de cera de Anna Frank, son los movimientos del brazo robótico los que transforman nuestra mirada y percepción subjetiva, los que dan a «Likeness» su carácter «vivo» o «en vivo».
Louis-Philippe Demers, The blind robot

Fotografía de The blind robot, de Louis-Philippe Demers
Fuente: https://www.flickr.com/photos/arselectronica/9499991149/in/photostream/
El «robot ciego» de Louis-Philippe Demers consiste en un par de brazos de estética mecánica conectados a un torso mínimo y sin cabeza. Una sola persona se sienta frente al robot. Tras el robot, un espejo le devuelve el reflejo de su propia cara.
El robot alza los brazos y sus dedos empiezan a moverse rítmicamente, recorriendo con cuidado la cabeza, cara, hombros y brazos de esa persona. El robot toca con cautela, como si tratara de ver. La persona a su vez ve, en el espejo, su propia figura siendo explorada por los cuidadosos dedos del «robot ciego».
Para Louis-Philippe Demers, el tacto del robot, asociado a la idea de su ceguera, contribuye a percibirlo como una entidad vulnerable. Y esto, a su vez, facilita que el robot, con su tocar, desencadene una experiencia de cierta intimidad en la audiencia.
El robot no cumple con las expectativas de frialdad enfatizadas por su apariencia mecánica. Por el contrario, el cuidado, la vulnerabilidad y la intimidad se sitúan en (y provienen de) el robot. Este desplazamiento de los atributos y capacidades afectivas es lo que da tensión a la performance.
El carácter afectivo de la performance no radica ni siquiera en la semblanza con lo humano. Es mediante su propio maquínico movimiento que el robot corporeiza formas de intimidad.
A diferencia de otros de los trabajos vistos más arriba, The blind robot plantea una relación con lo no humano y con lo robótico, basada en formas de cuidado y curiosidad afectuosa.
Referencias
Eckersall, P.; Grehan, H.; Scheer, E. (2017). New Media Dramaturgy. Palgrave Macmillan UK. <https://doi.org/10.1057/978-1-137-55604-2>
Dixon, S. (2007). Digital performance: A history of new media in theater, dance, performance art, and installation. MIT Press.