En el paquete ED1+Art encontraréis dos tipos de motores: el motor paso a paso y el servomotor.
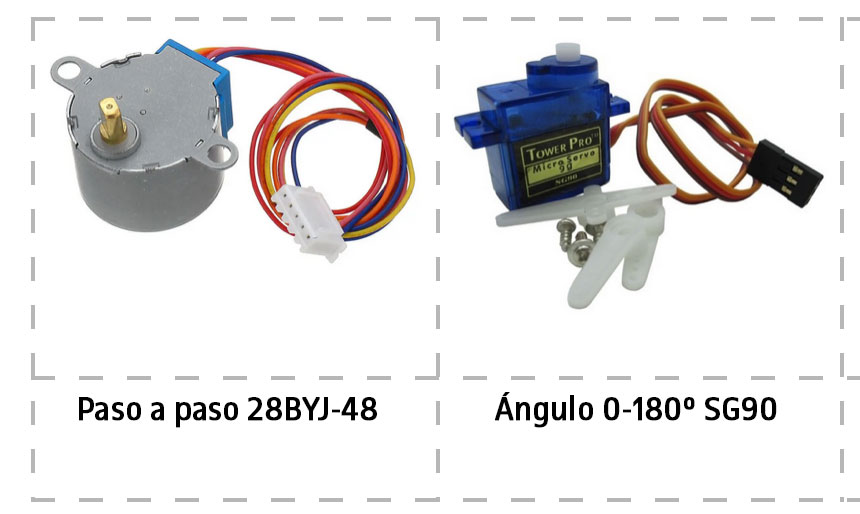
Los motores paso a paso son los más precisos, ideales para usarlos para mover las ruedas de un robot, por ejemplo. Estos motores, a mayor escala, son los que utilizan las impresoras 3D, puesto que dan mucha precisión para determinar coordenadas x, y y z, que es como funcionan estas máquinas.
En cambio, los servomotores tienen más fuerza y van bien para mover componentes con mayor peso, pero no son tan precisos. De hecho, el que tenéis solo os deja girar un ángulo de 180 grados, lo que os ayuda a dejar su posición siempre en el mismo sitio pero os limita para hacer una vuelta entera.
Pauta de conexión de los motores
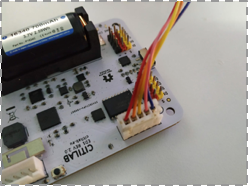
1) Motor paso a paso
Para los motores paso a paso o steppers la placa ED1 ya incorpora un par de conectores dedicados:
2) Servomotores
En cuanto a los servomotores, habrá que conectarlos a cualquiera de los pines digitales D1-D4 de la siguiente forma:
- Negro o marró: pin negativo (-)
- Rojo: pin positivo (+)
- Blanco o naranja: pin de señal (S)
Uso de los motores con MicroBlocks
1) Motor paso a paso:
Para usar los motores paso a paso hay que utilizar la librería ED1 Stepper Motor.ubl que hay en la carpeta «Other». Por ejemplo, para mover dos steppers a la vez cuando la placa detecte poca luz:

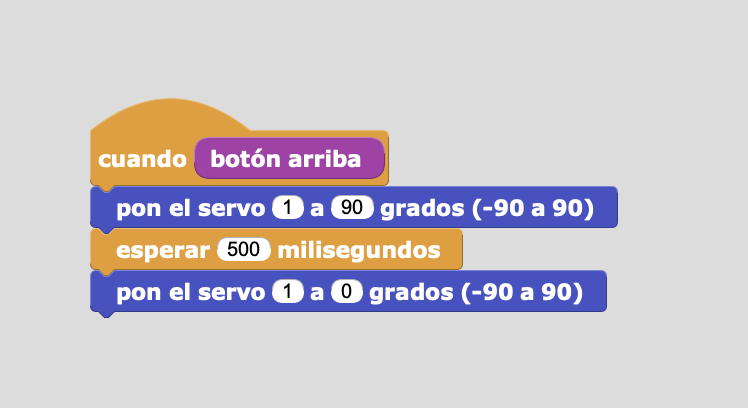
2) Servos 180 grados
En el caso de los servomotores habrá que utilizar la librería Servo.ubl. Un ejemplo de cómo mover un servo de 180º de un lado a otro mediante un par de botones de dirección de la placa: