Amb micro:bit, podem generar moviments de maneres diferents. Dues de les més habituals són els servosistemes (com el que teniu en el vostre equip) i els motors de corrent continu. La diferència entre tots dos és que els servosistemes tenen un rang de moviment limitat (el nostre, 180°) però ens permeten girar a posicions concretes amb precisió, i els motors de corrent continu són generalment per a girar a altes velocitats (per exemple, per a ventiladors, hèlices, etc.) sense poder fer un control precís de la posició.
Amb el servosistema que teniu al vostre equip es poden fer activitats molt suggeridores, i ara ho veurem amb un parell d’exercicis. Però, evidentment, per a fer moviments sofisticats i robotitzacions, necessitaríeu més d’un servosistema o motor. Aquests són bastant econòmics i fàcils d’aconseguir per internet o en qualsevol botiga d’electrònica.
Si en el repte anterior ja vau fer totes les activitats introductòries que porta el mateix equip, sabreu com connectar i programar el servosistema. Però repassem-lo abans de presentar els exercicis.
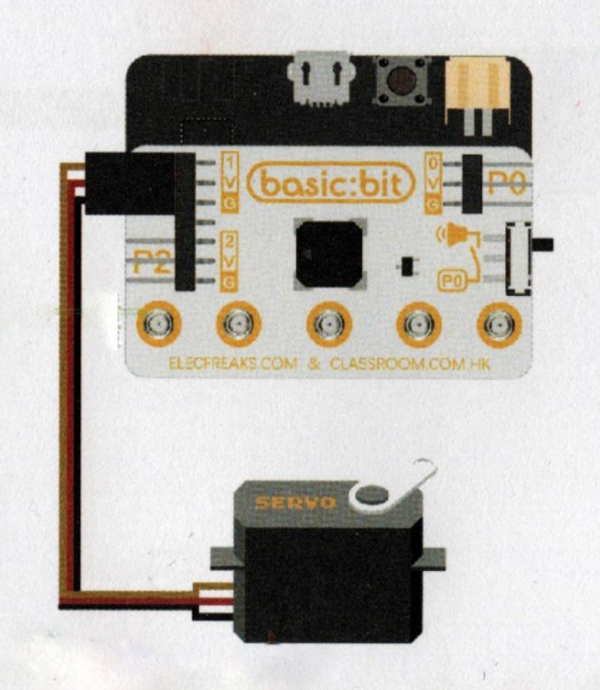
Tal com veieu en la figura anterior, connectar el servosistema a la micro:bit és tan senzill com connectar els tres cables que són junts amb el connector P1 de la basic:bit, que haureu d’haver acoblat prèviament a la micro:bit. Fixeu-vos bé en l’orientació dels colors. El negre sempre ha d’anar connectar amb la G (Ground).
Un cop connectat el servosistema, per a programar-lo des del MakeCode haurem de fer servir la instrucció «servo write pin P1 to X», en la qual X hauria de ser un nombre de graus entre 0 i 180, que és el marge de rotació que teniu amb aquest servosistema.
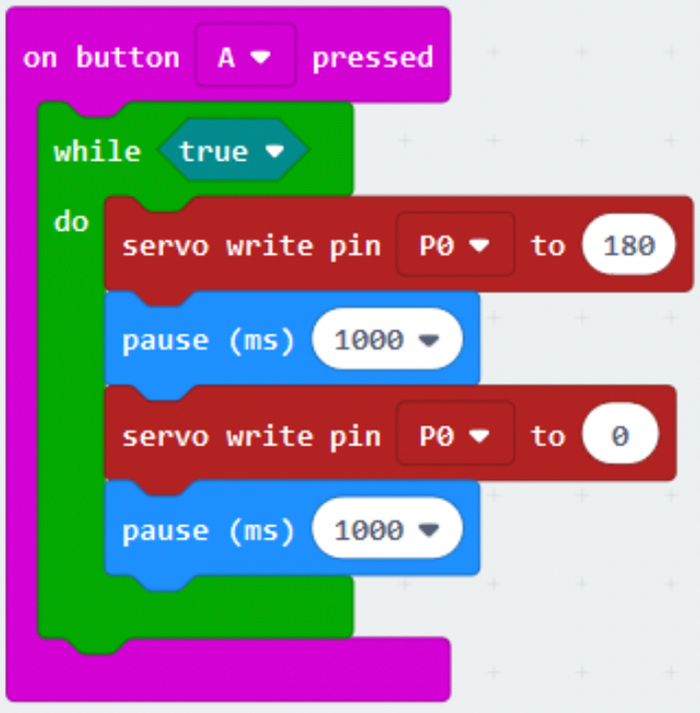
Per exemple, el codi següent fa que quan premem el botó A de la micro:bit, el servosistema comenci a moure’s de 0 a 180 graus alternativament, amb pauses d’1 segon (1.000 ms). Aquest programa no para fins que fem una inicialització en la micro:bit (torna a esperar que premem el botó) o fins que la desconnectem de la bateria o font d’alimentació.